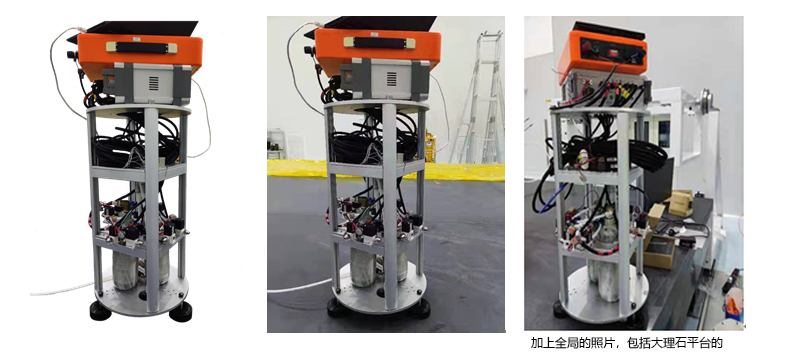
功能原理:零重力模拟机器人的工作原理是通过平面气浮轴承提供微低重力机器人环境,模拟航天器在太空中的轨道姿态运动,通过冷气推力机构输出力和力矩,实现对机器人运动的精确控制。零重力模拟机器人根据搭载的定位、通信等系统可应用于航天器交会对接、编队飞行等工作的模拟实验。
主要参数:
横向(x轴方向)相对位置控制精度:6cm;
横向相对速度控制精度:4cm/s;
轴向(z轴方向)抵近速度:2±0.5cm/s;
相对姿态偏差:不大于1°;
相对角速度控制精度:0.3°/s;
重复控制精度5%之内。
仪器设备 +
发布人:日期:2022年01月12日 17:53浏览数:
功能原理:零重力模拟机器人的工作原理是通过平面气浮轴承提供微低重力机器人环境,模拟航天器在太空中的轨道姿态运动,通过冷气推力机构输出力和力矩,实现对机器人运动的精确控制。零重力模拟机器人根据搭载的定位、通信等系统可应用于航天器交会对接、编队飞行等工作的模拟实验。
主要参数:
横向(x轴方向)相对位置控制精度:6cm;
横向相对速度控制精度:4cm/s;
轴向(z轴方向)抵近速度:2±0.5cm/s;
相对姿态偏差:不大于1°;
相对角速度控制精度:0.3°/s;
重复控制精度5%之内。
上一条:高精度三轴卫星气浮仿真试验台
下一条:低摩擦恒力气缸
【关闭】 打印 收藏